Dynamics
The mathematical approach to change over time. Most dynamical systems are nonlinear and generally unsolvable, and though deterministic are often unpredictable.
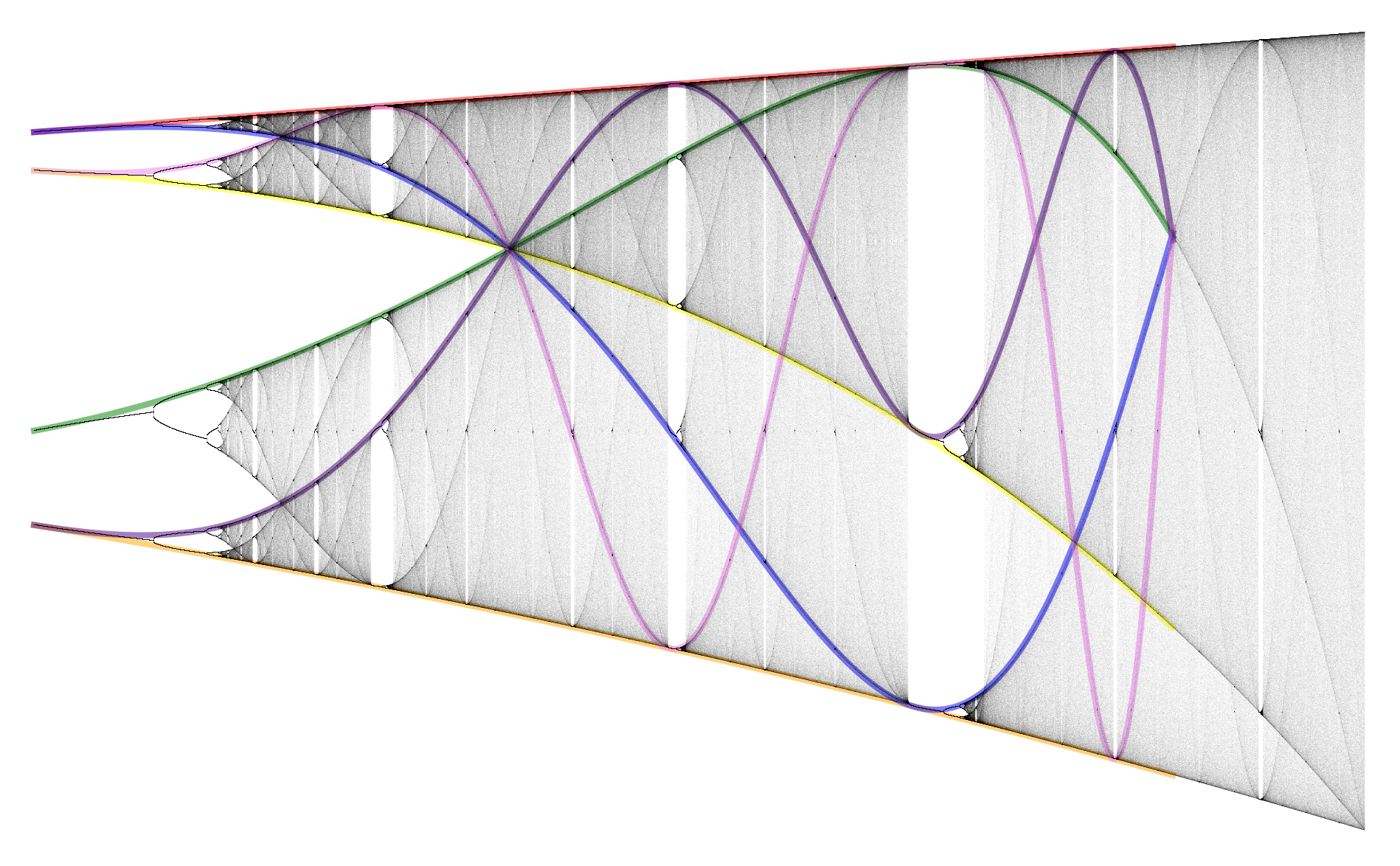
Logistic map
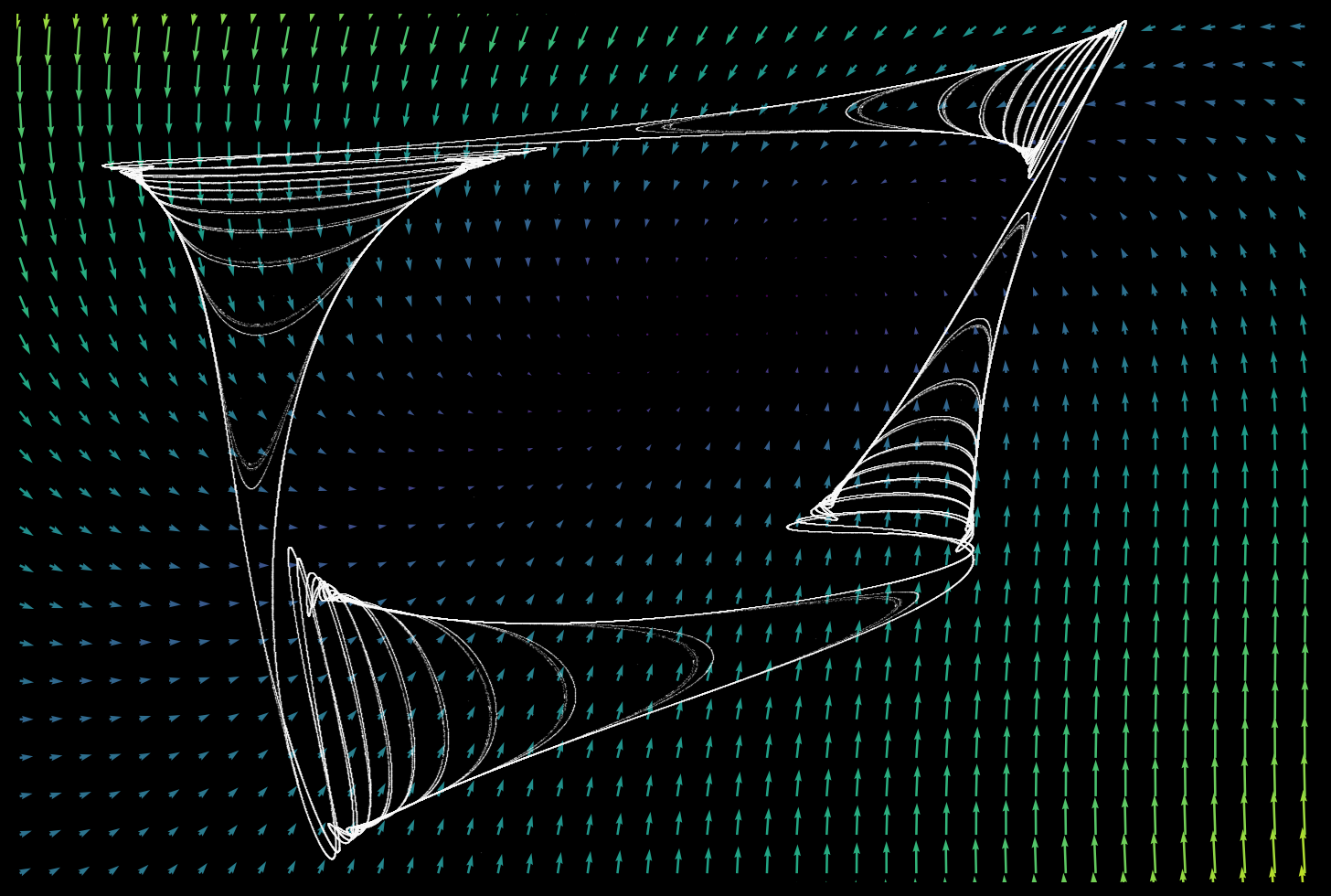
Clifford attractor
Grid map
Pendulum phase space
Boundaries
Trajectories of any dynamical equation may stay bounded or else diverge towards infinity. The borders between bounded and unbounded trajectories can take on spectacular fractal geometries.
Polynomial roots I
Polynomial roots II
Julia sets
Mandelbrot set
Henon map
Clifford map
Logistic map
Foundations
Primes are unpredictable
\[\lnot \exists n, m : (g_n, g_{n+1}, g_{n+2}, ... , g_{n + m - 1}) \\ = (g_{n+m}, g_{n+m+1}, g_{n+m+2}, ..., g_{n + 2m - 1}) \\ = (g_{n+2m}, g_{n+2m+1}, g_{n+2m+2}, ..., g_{n + 3m - 1}) \\ \; \; \vdots\]Aperiodicity implies sensitivity to initial conditions
\[f(x) : f^n(x(0)) \neq f^{n+k}(x(0)) \forall k \implies \\ \forall x_1, x_2 : \lvert x_1 - x_2 \rvert < \epsilon, \; \\ \exists n \; : \lvert f^n(x_1) - f^n(x_2) \rvert > \epsilon\]Aperiodic maps, irrational numbers, and solvable problems
\[\Bbb R - \Bbb Q \sim \{f(x) : f^n(x(0)) \neq f^k(x(0))\} \\ \text{given} \; n, k \in \Bbb N \; \text{and} \; k \neq n \\\]Irrational numbers on the real line
\[\Bbb R \neq \{ ... x \in \Bbb Q, \; y \in \Bbb I, \; z \in \Bbb Q ... \}\]Discontinuous aperiodic maps
\[\{ f_{continuous} \} \sim \Bbb R \\ \{ f \} \sim 2^{\Bbb R}\]Poincaré-Bendixson and dimension
\[D=2 \implies \\ \forall f\in \{f_c\} \; \exists n, k: f^n(x) = f^k(x) \; if \; n \neq k\]Computability and Periodicity I: the Church-Turing thesis
\[\\ \{i_0 \to O_0, i_1 \to O_1, i_2 \to O_2 ...\}\]Computability and Periodicity II
\[x_{n+1} = 4x_n(1-x_n) \implies \\ x_n = \sin^2(\pi 2^n \theta)\]Nonlinearity and dimension
Reversibility and periodicity
\[x_{n+1} = rx_n(1-x_n) \\ \; \\ x_{n} = \frac{r \pm \sqrt{r^2-4rx_{n+1}}}{2r}\]Additive transformations
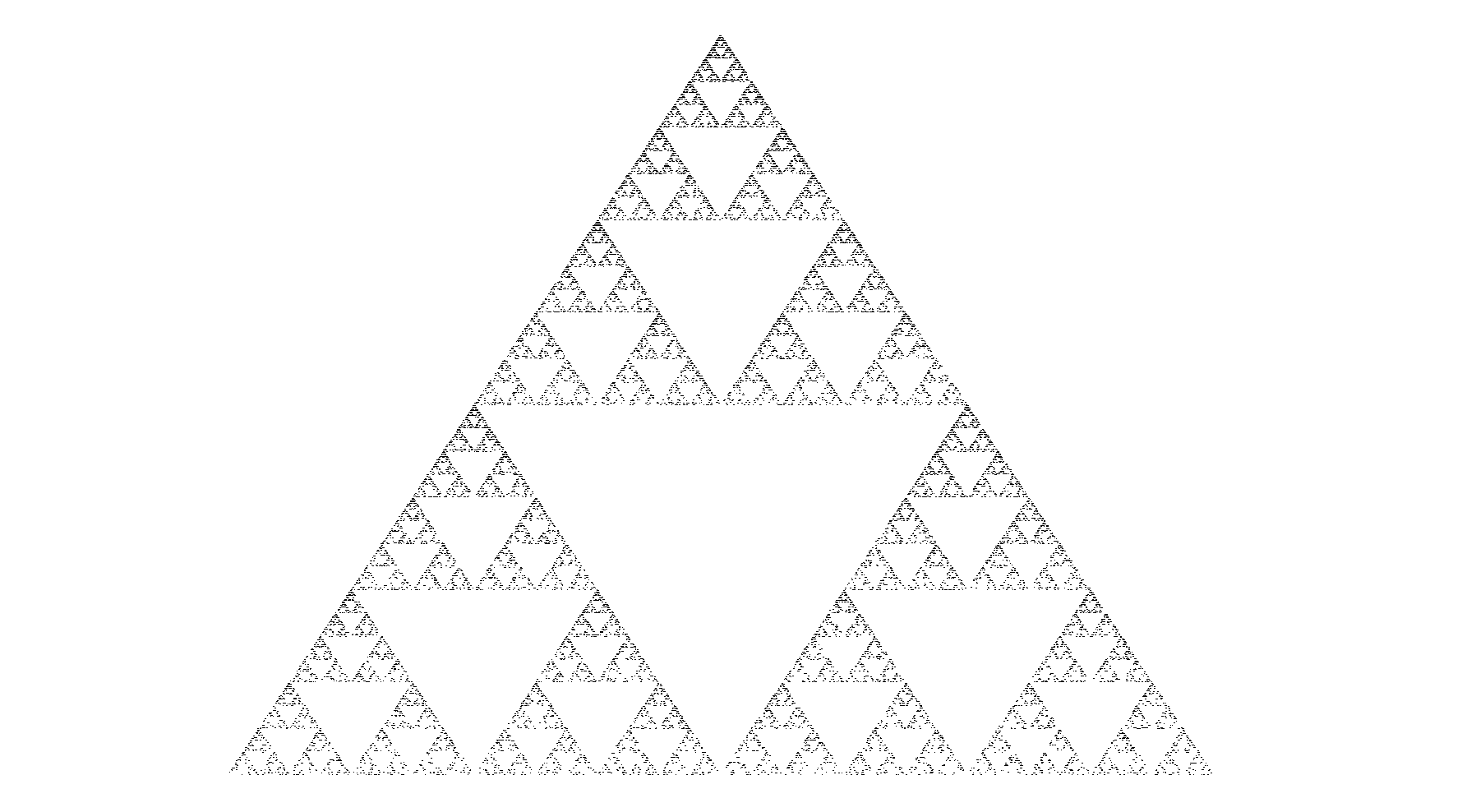
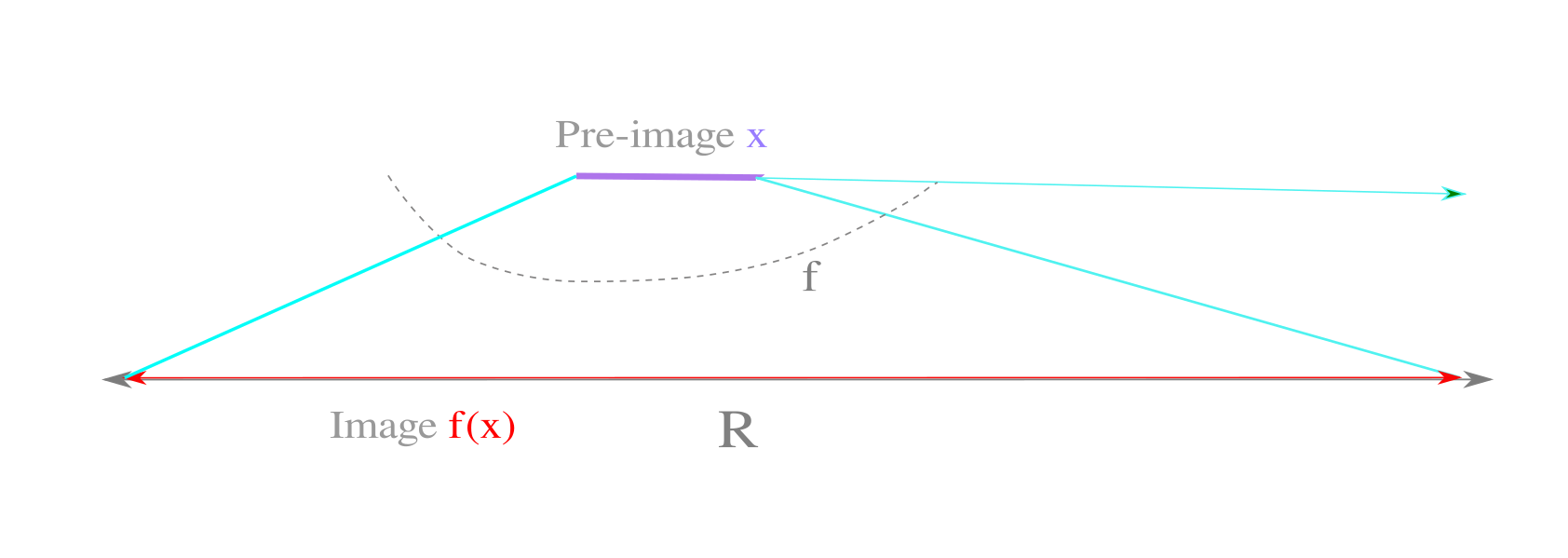
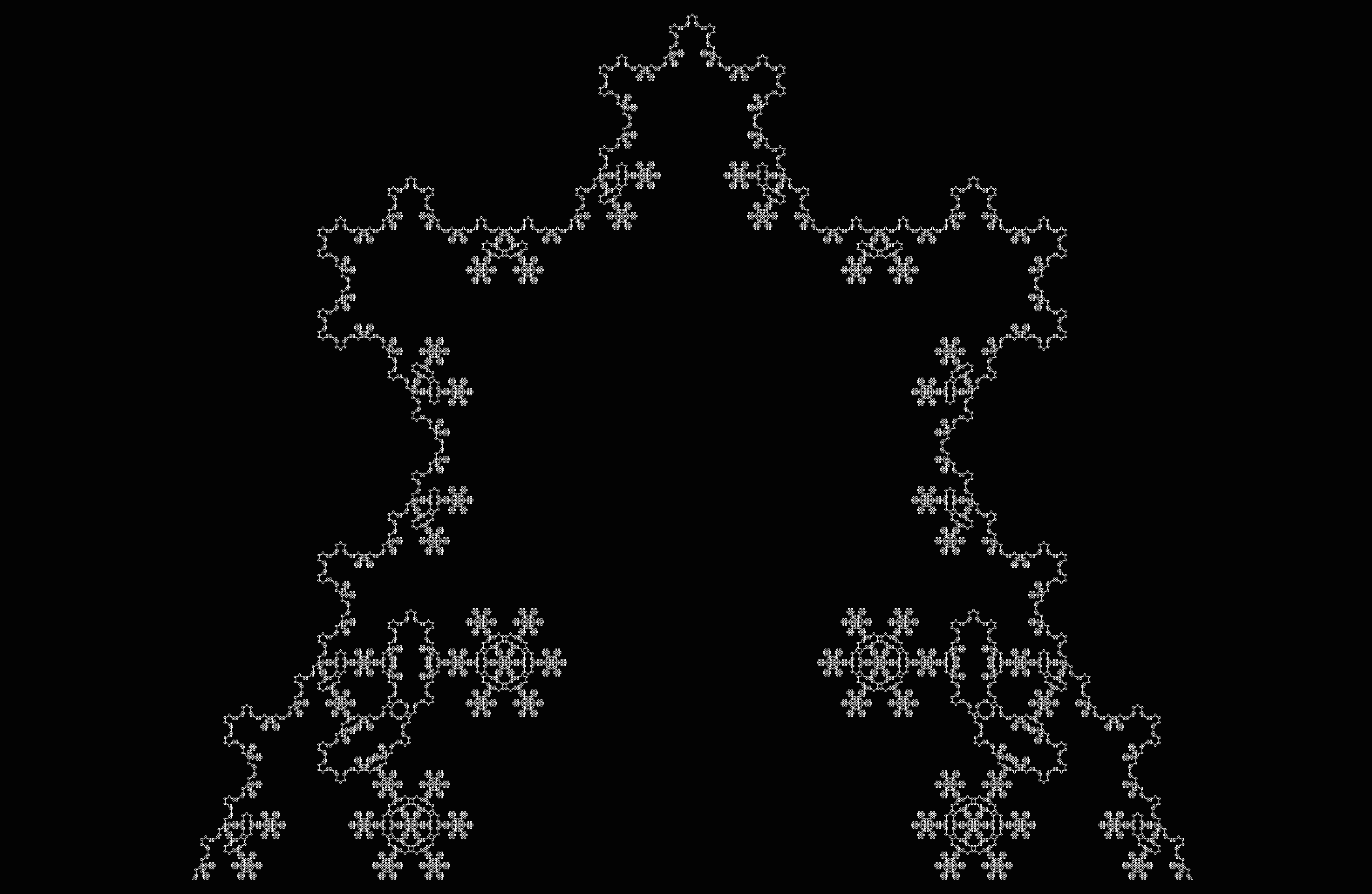
Fractal Geometry
Physics
As for any natural science, an attempt to explain observations and predict future ones using hypothetical statements called theories. Unlike the case for axiomatic mathematics, such theories are never proven because some future observation may be more accurately accounted for by a different theory. As many different theories can accurately describe or predict any given set of observations, it is customary to favor the simplest as a result of Occam’s razor.
Three Body Problem I
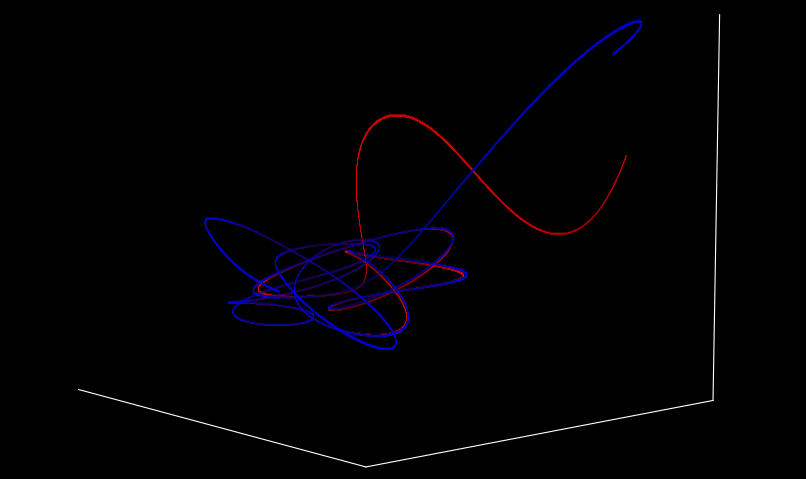
Three Body Problem II: Parallelized Computation with CUDA
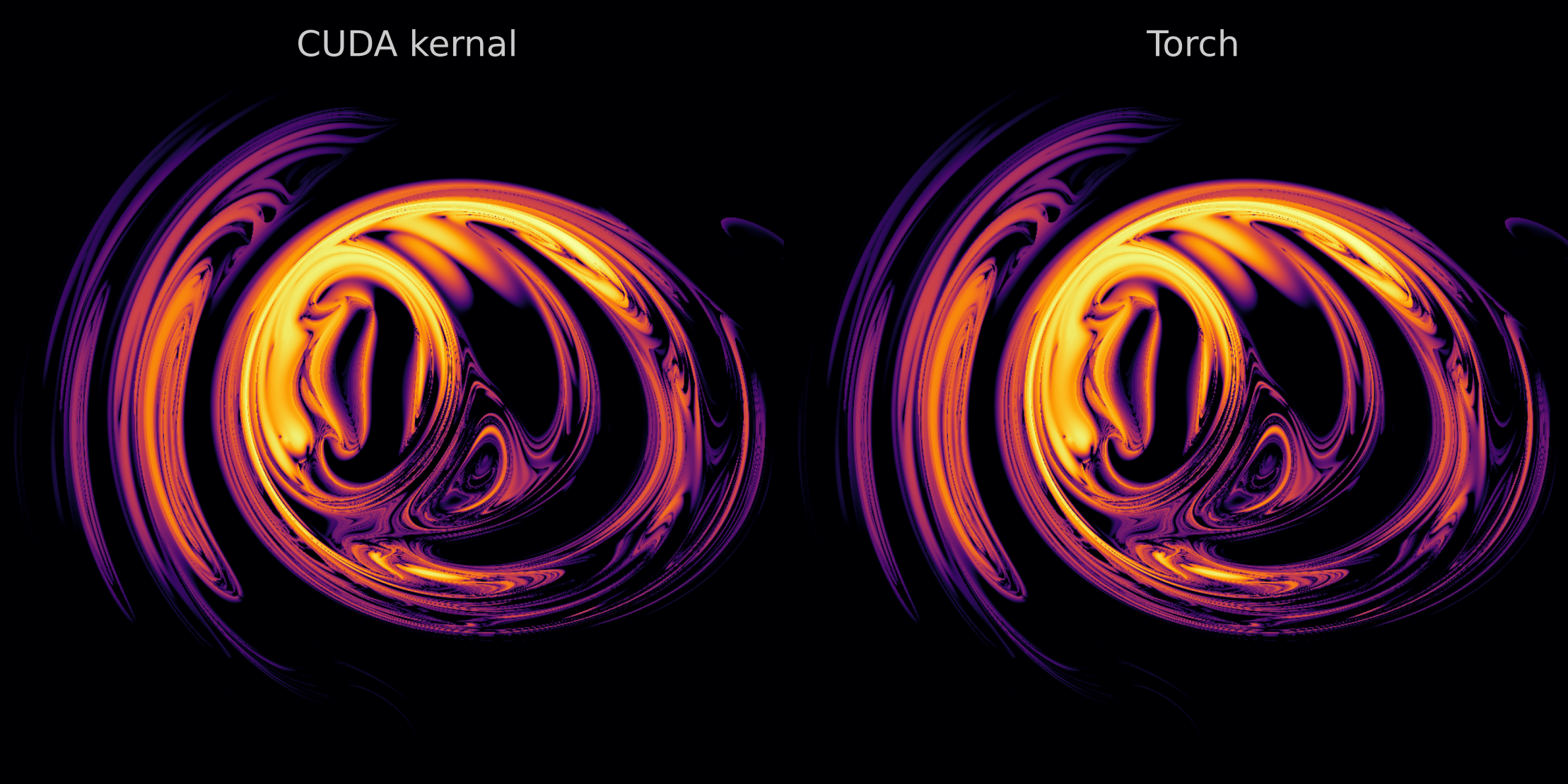
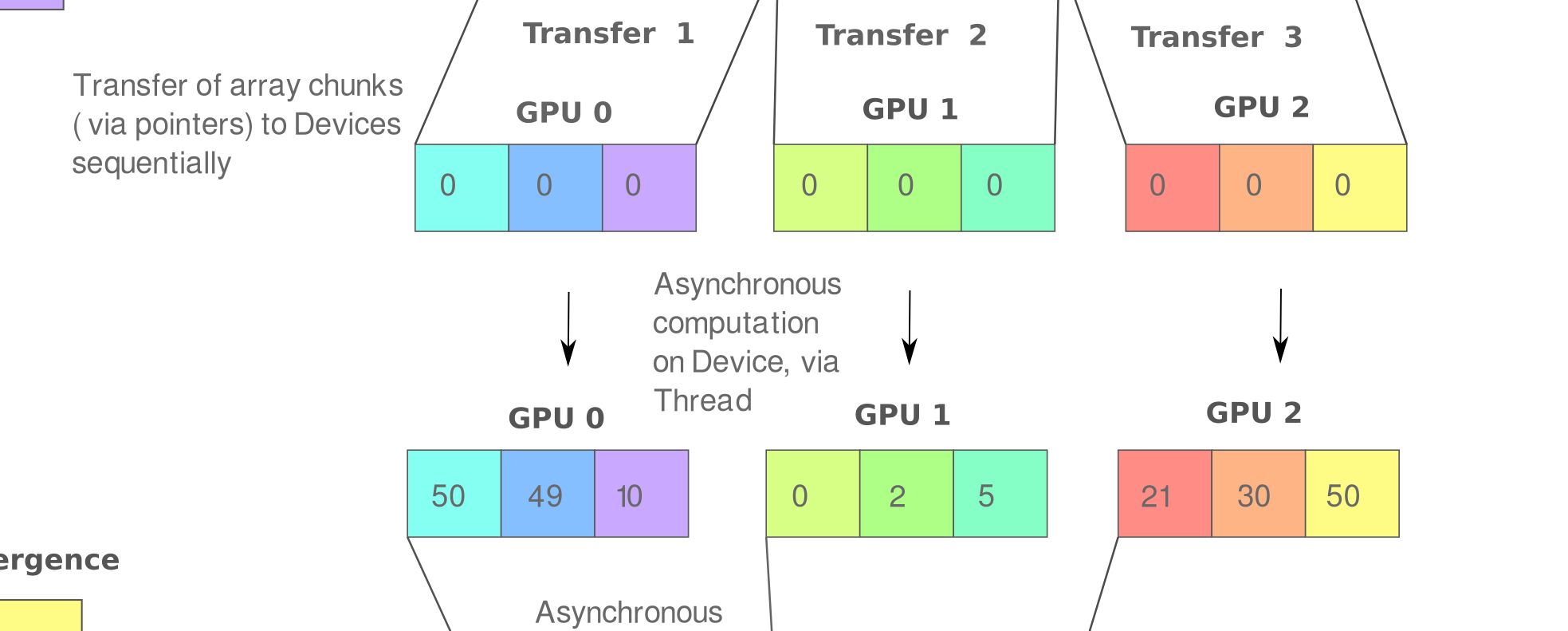
Three Body Problem III: Distributed Multi-GPU simulations
Entropy
Quantum Mechanics
\[P_{12} \neq P_1 + P_2 \\ P_{12} = P_1 + P_2 + 2\sqrt{P_1P_2}cos \delta\]Biology
The study of life, observations of which display many of the features of nonlinear mathematical systems: an attractive state resistant to perturbation, lack of exact repeats, and simple instructions giving rise to intricate shapes and movements.
Genetic Information Problem

Homeostasis

Deep Learning
Machine learning with layered representations. Originally inspired by efforts to model the animalian nervous system, much work today is of somewhat dubious biological relevance but is extraordinarily potent for a wide range of applications. For some of these pages and more as academic papers, see here.
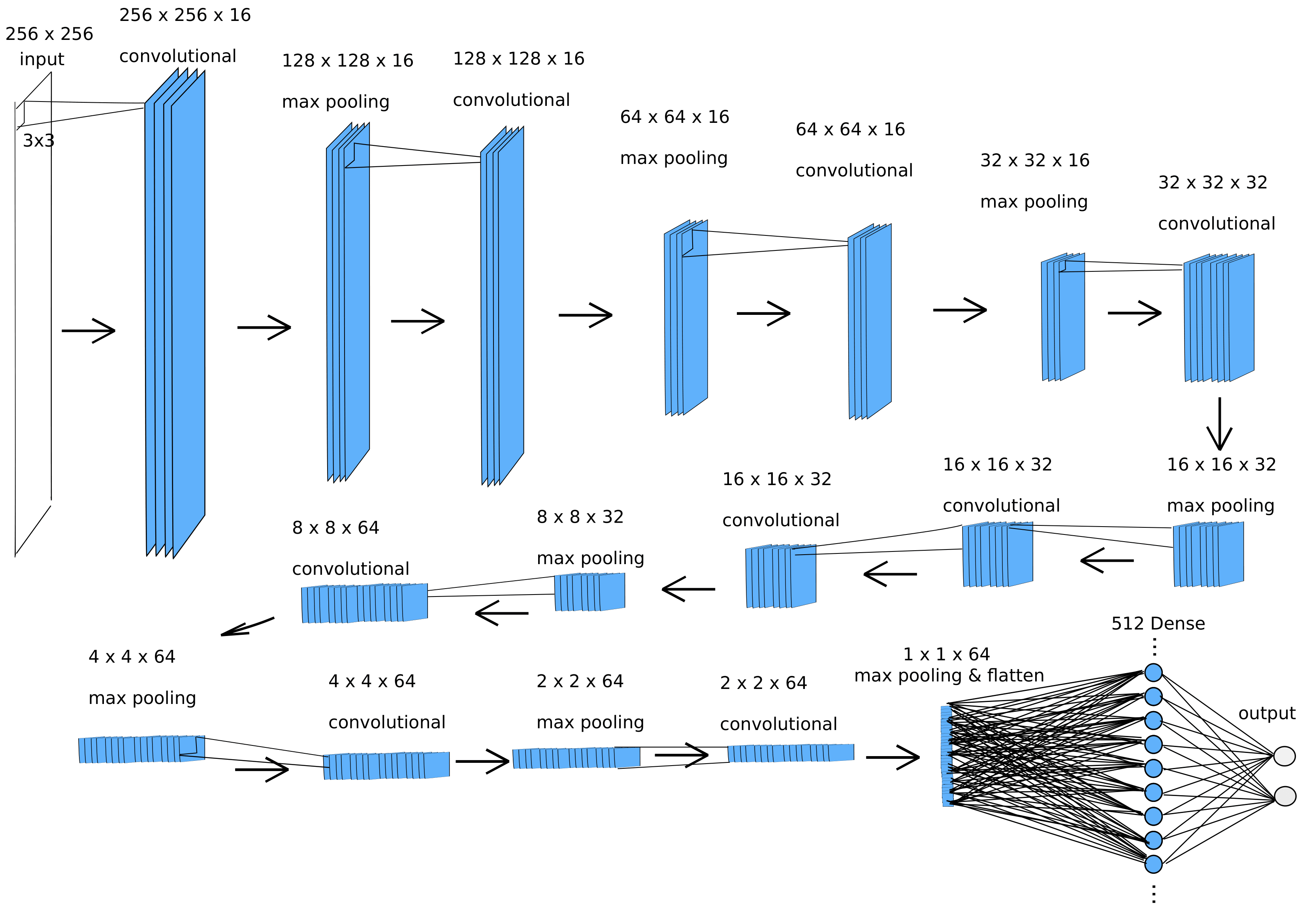
Image Classification
Input Attribution and Adversarial Examples
Input Generation I: Classifiers
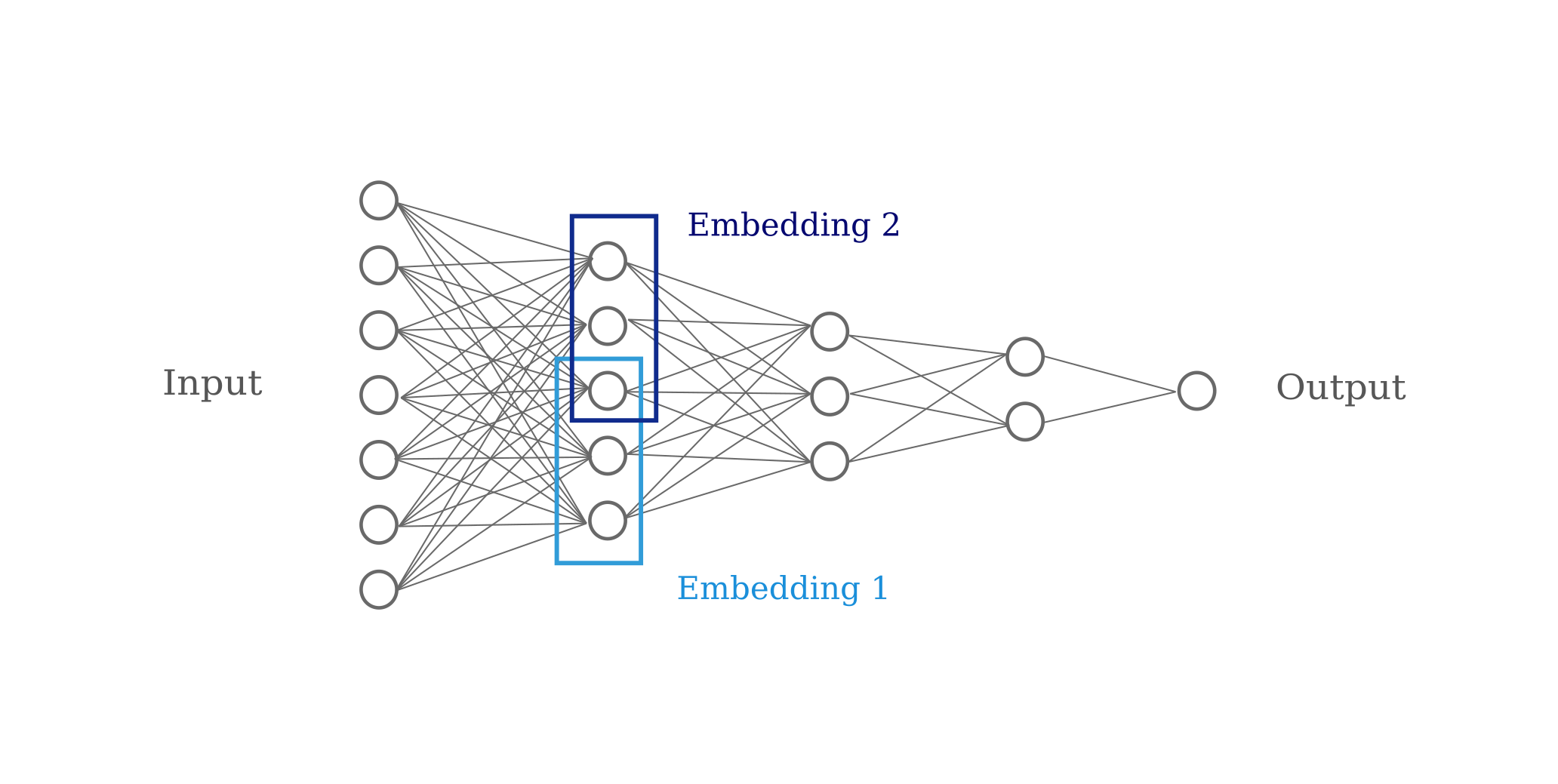
Input Generation II: Vectorization and Latent Space Embedding
Input Generation III: Input Representations
Input Representation I: Depth and Representation Accuracy
Input Representation II: Vision Transformers
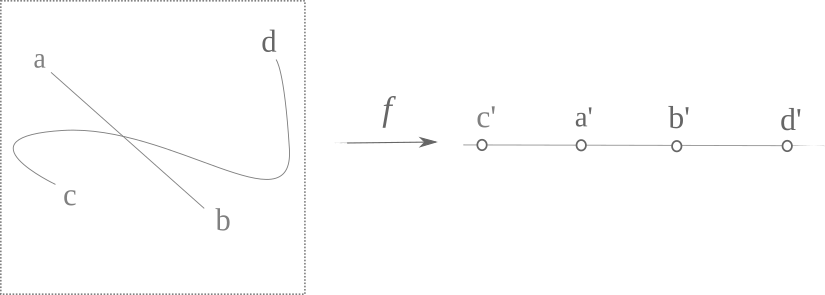
Language Representation I: Spatial Information
Language Representation II: Sense and Nonsense
\[\mathtt{This \; is \; a \; prompt \; sentence} \\ \mathtt{channelAvailability \; is \; a \; prompt \; sentence} \\ \mathtt{channelAvailability \; millenn \; a \; prompt \; sentence} \\ \dots \\ \mathtt{redessenal \; millenn-+-+DragonMagazine}\]Language Representation III: Noisy Communication on a Discrete Channel
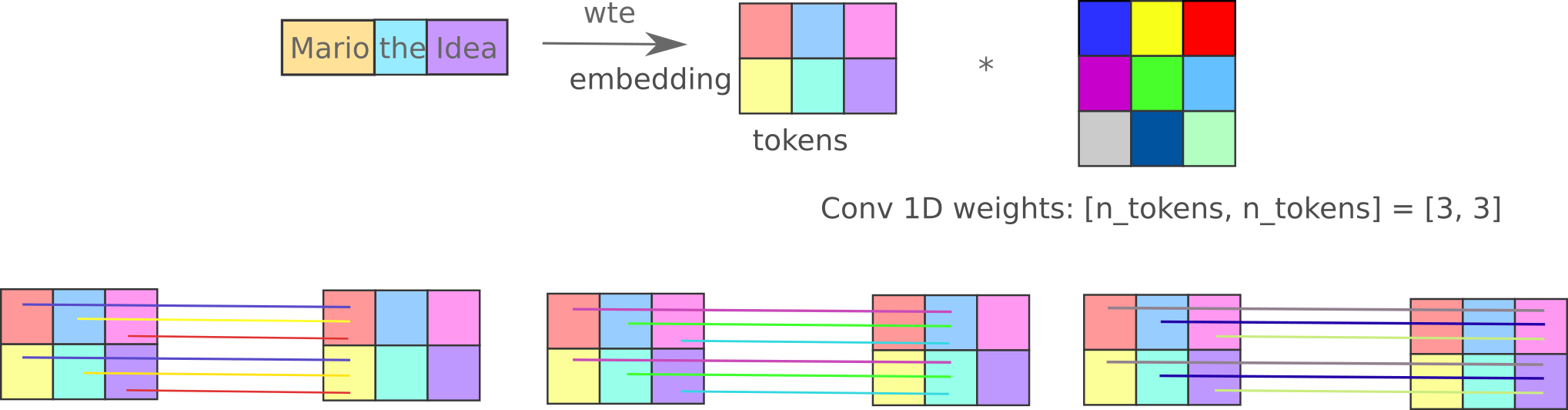
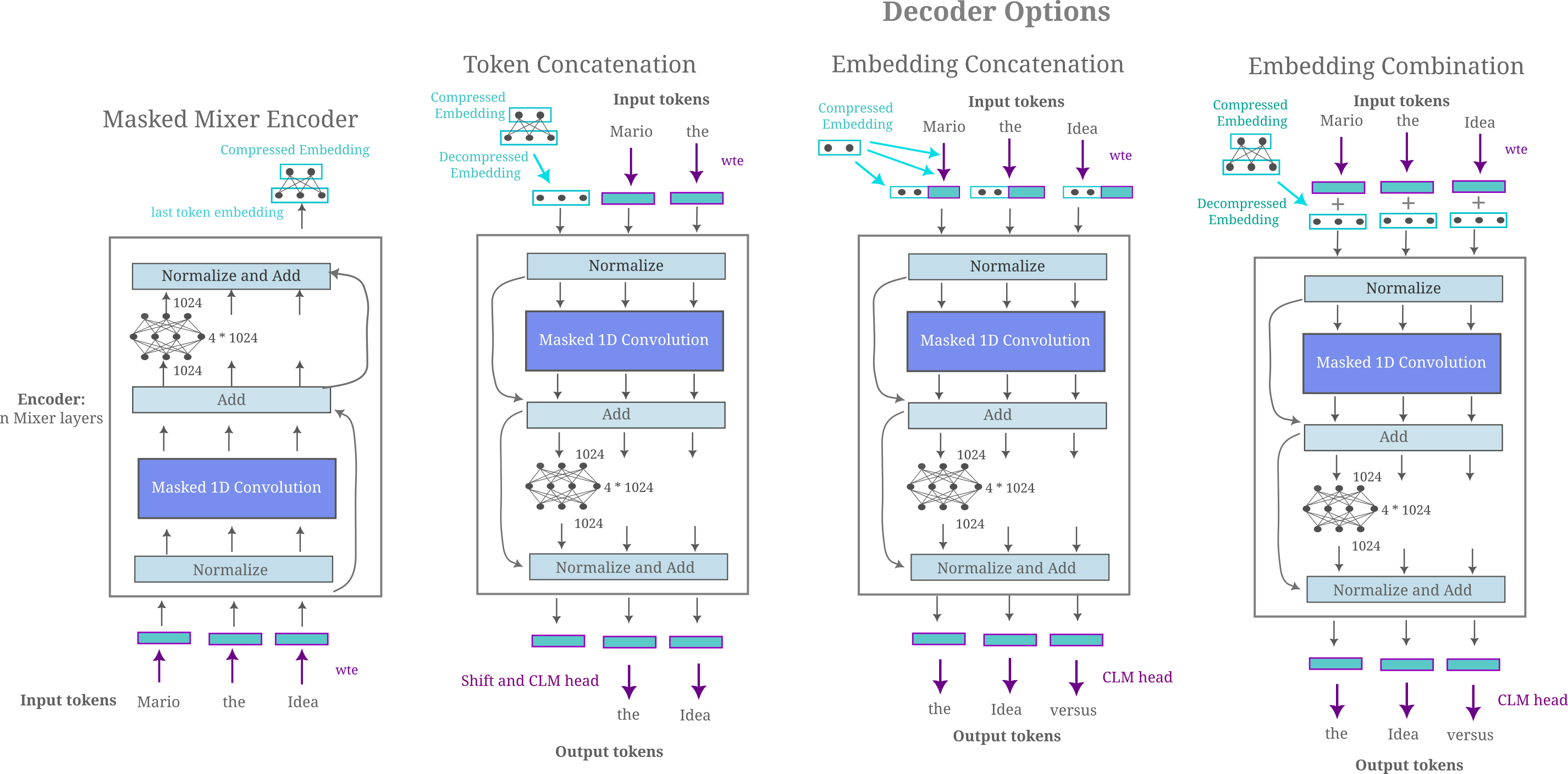
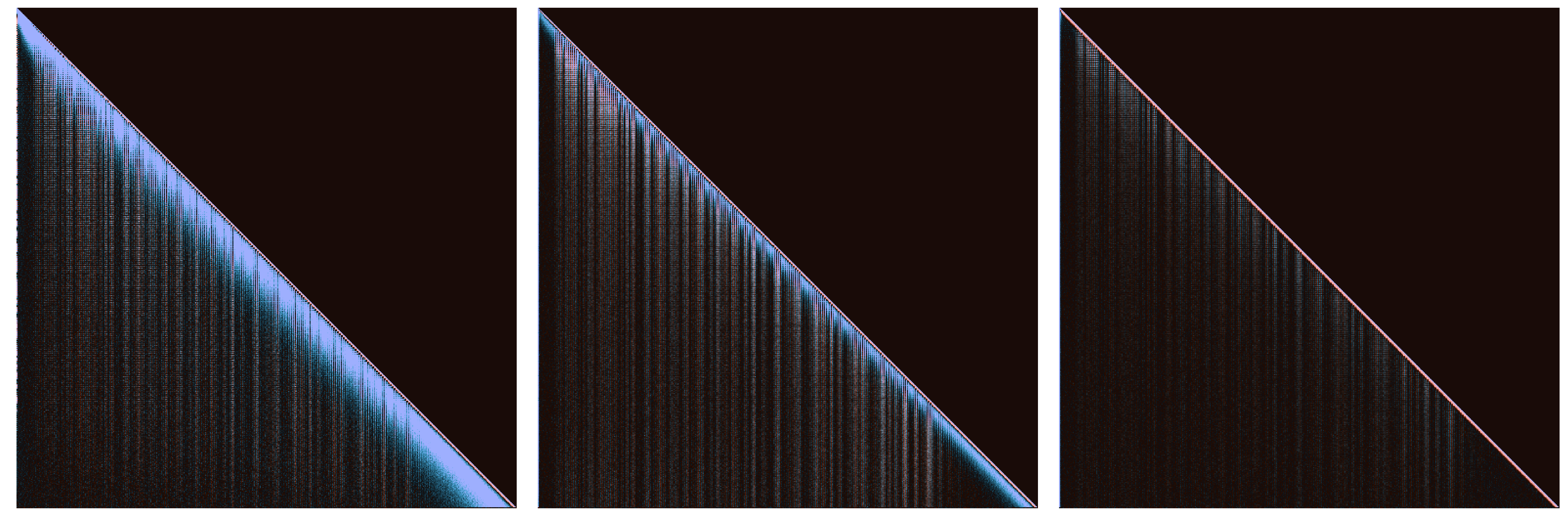
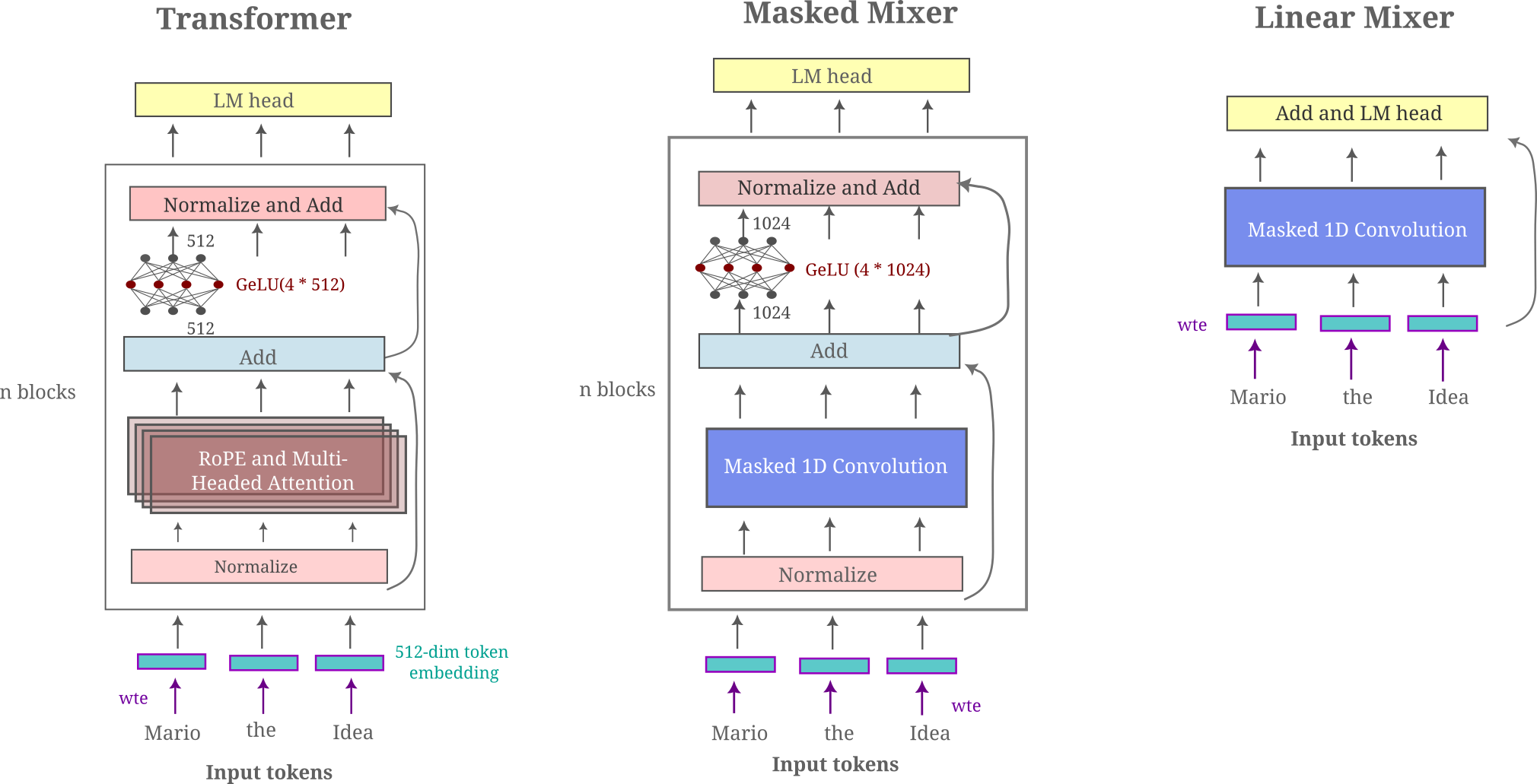
\[a_g([:, :, :2202]) = \mathtt{Mario \; the \; Idea \; versus \; Mario \; the \; Man} \\ a_g([:, :, :2201]) = \mathtt{largerpectedino missionville printed satisfiedward}\]Language Representation IV: Inter-token communication and Masked Mixers
Language Features
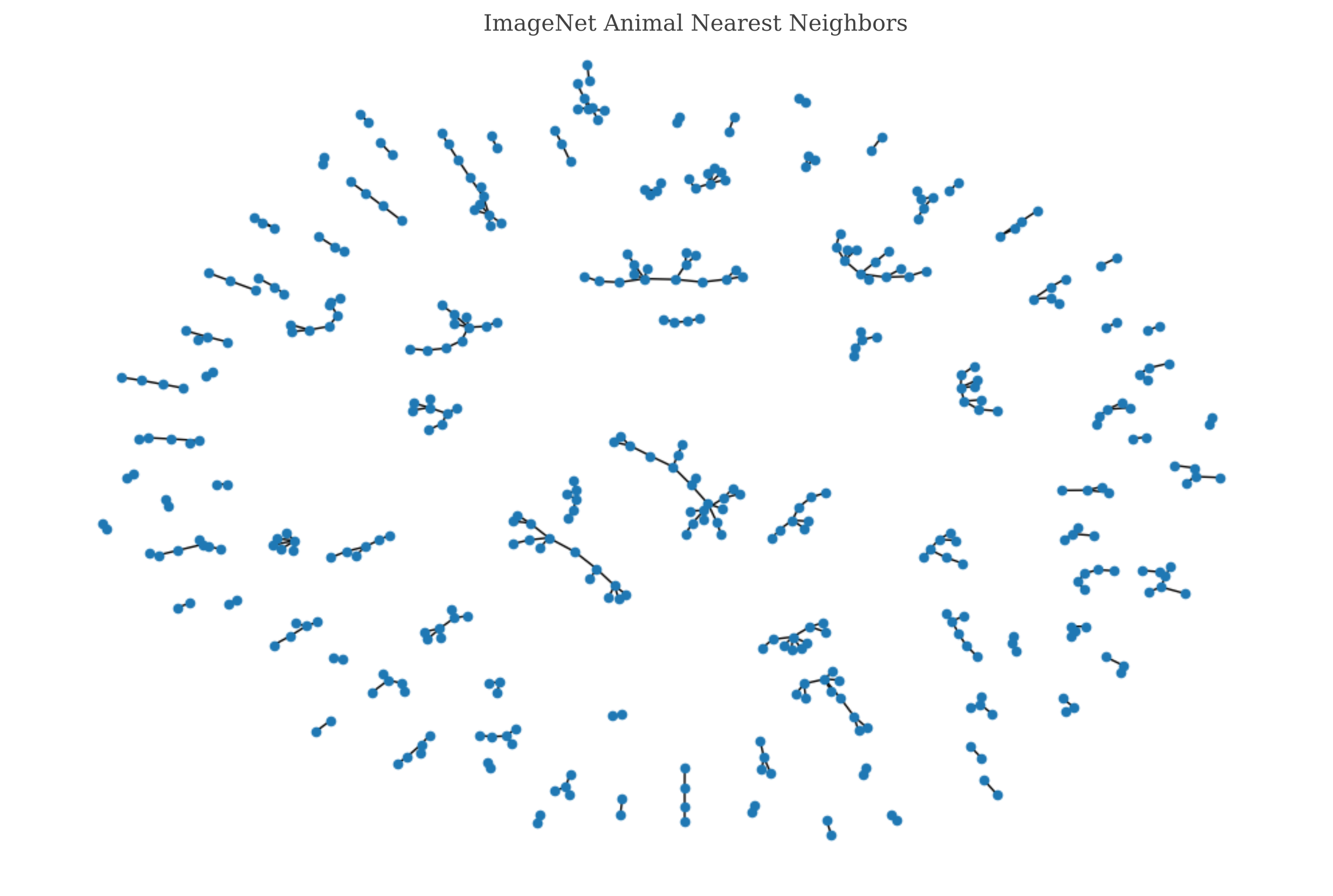
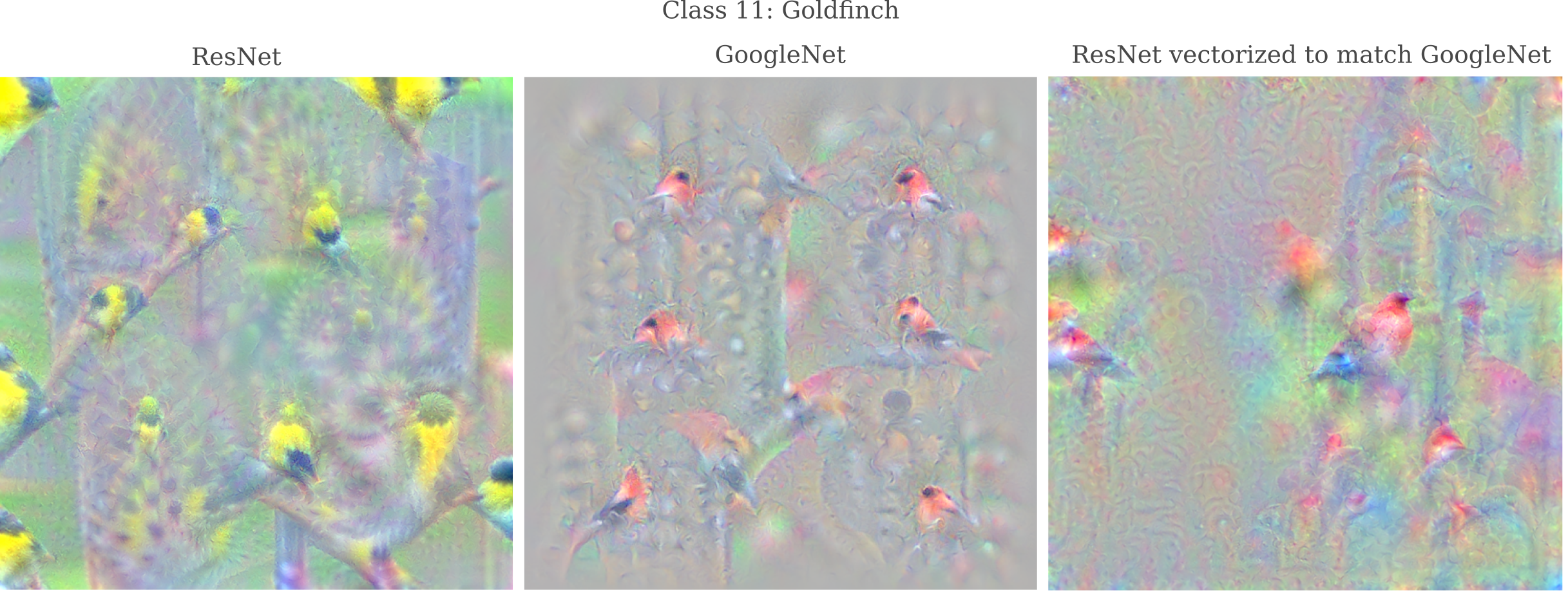
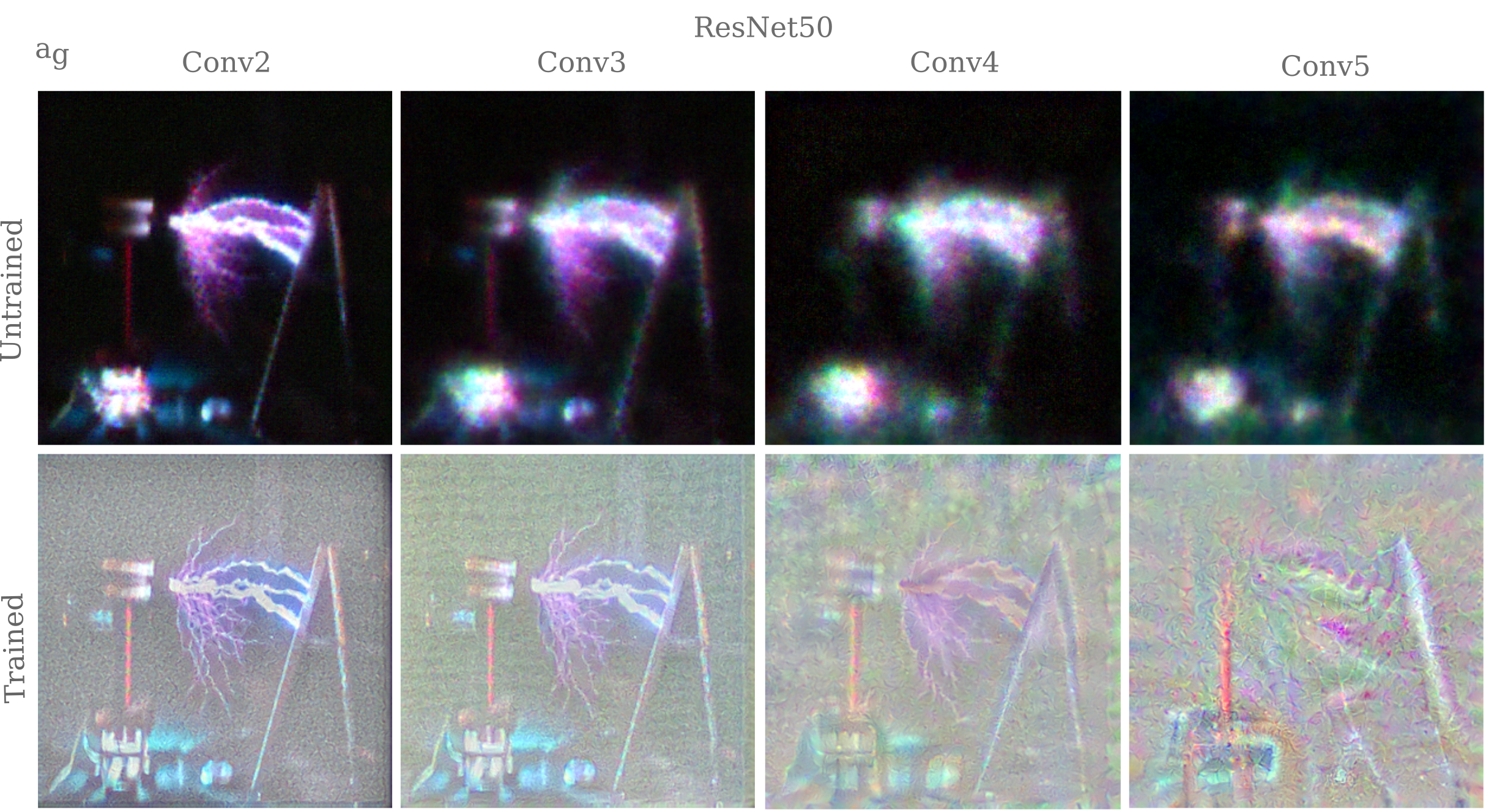
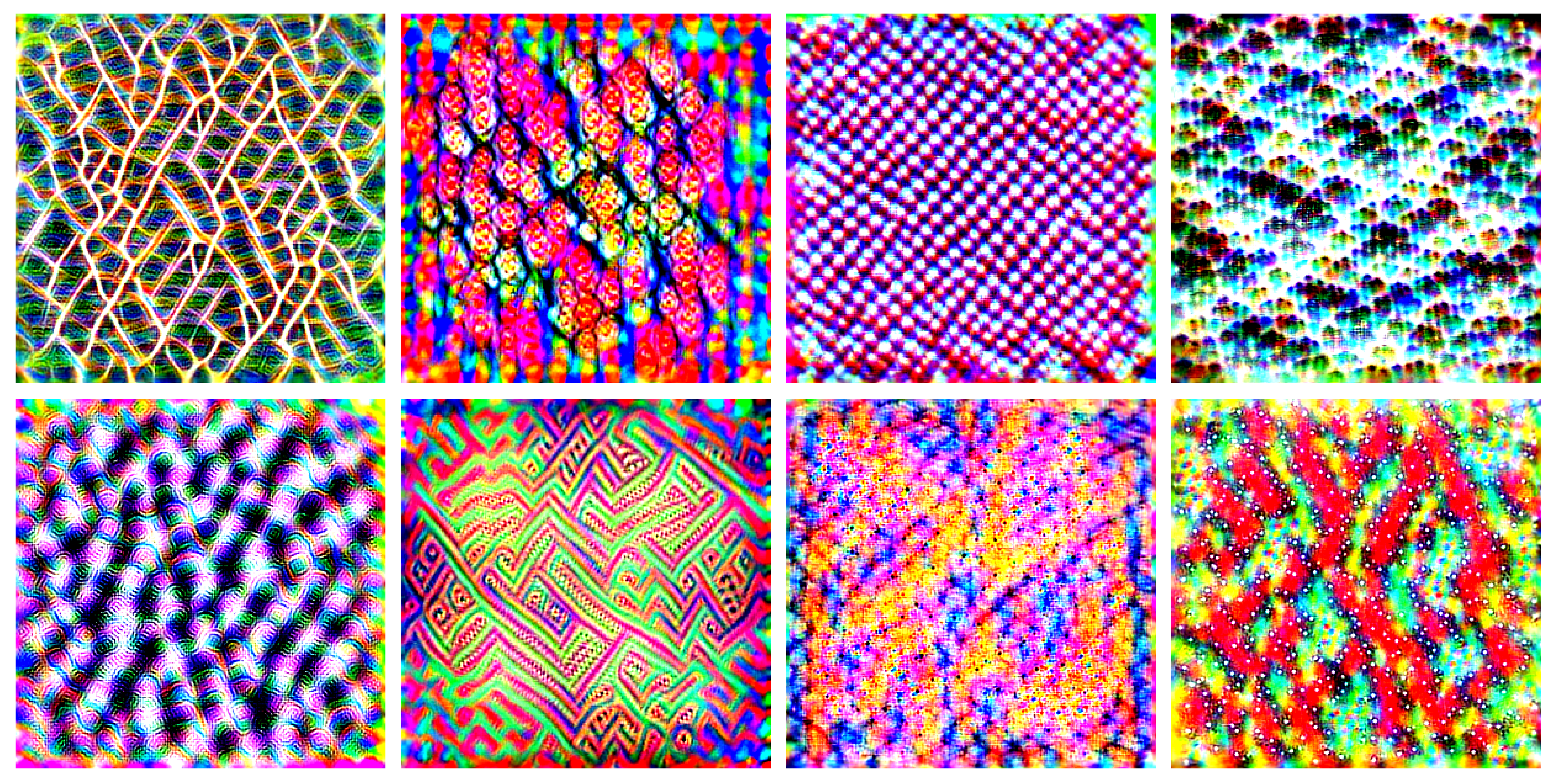
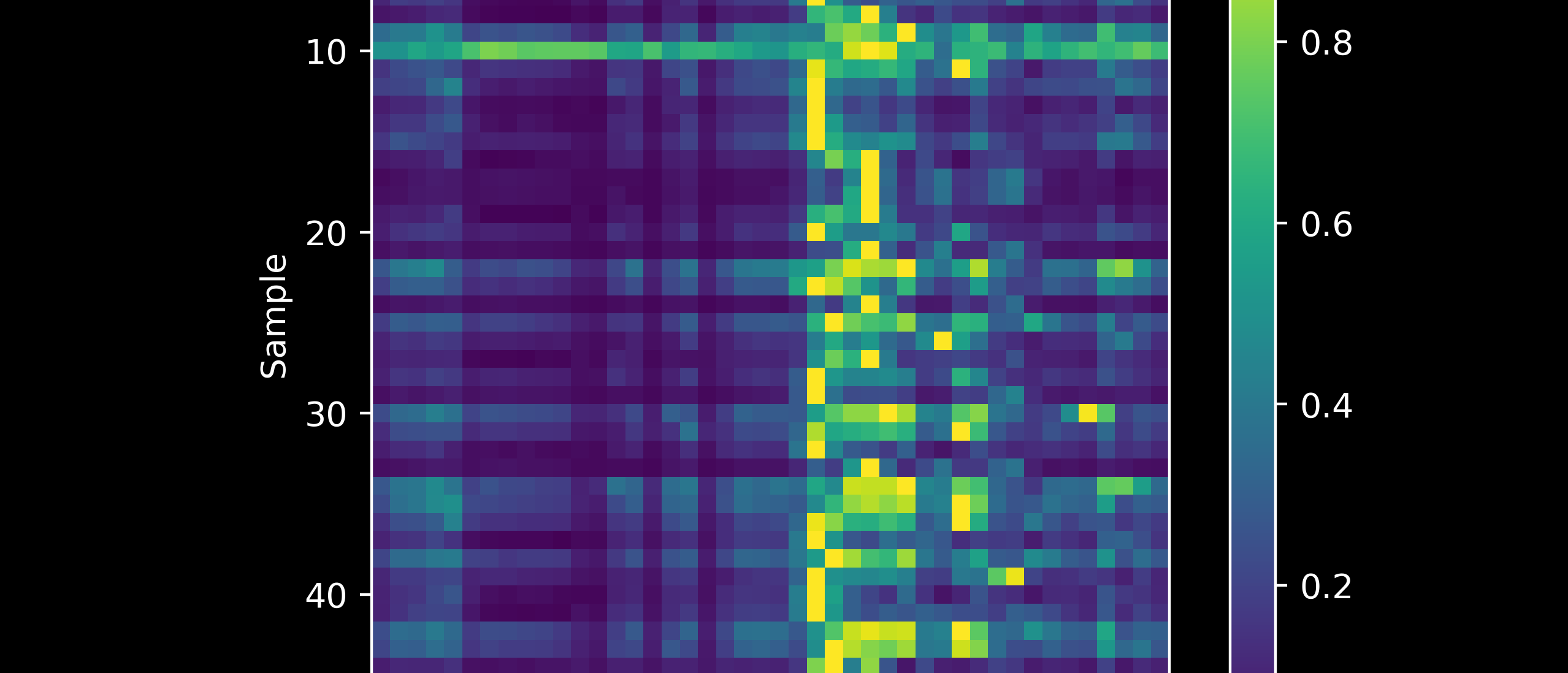
\[O_f = [:, \; :, \; 2000-2004] \\ a_g = \mathtt{called \; called \; called \; called \; called} \\ \mathtt{ItemItemItemItemItem} \\ \mathtt{urauraurauraura} \\ \mathtt{vecvecvecvecvec} \\ \mathtt{emeemeemeemeeme} \\\]Feature Visualization I
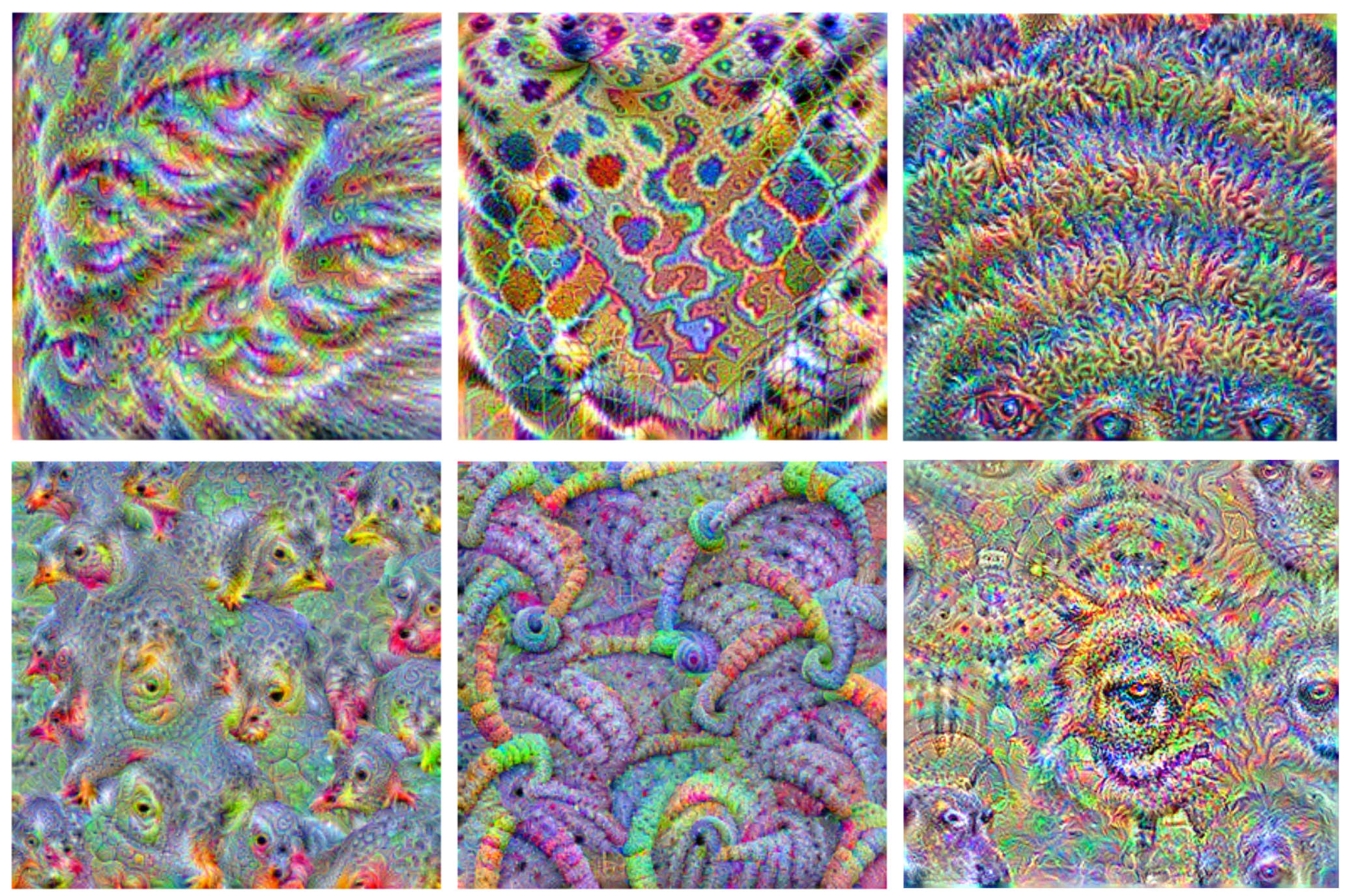
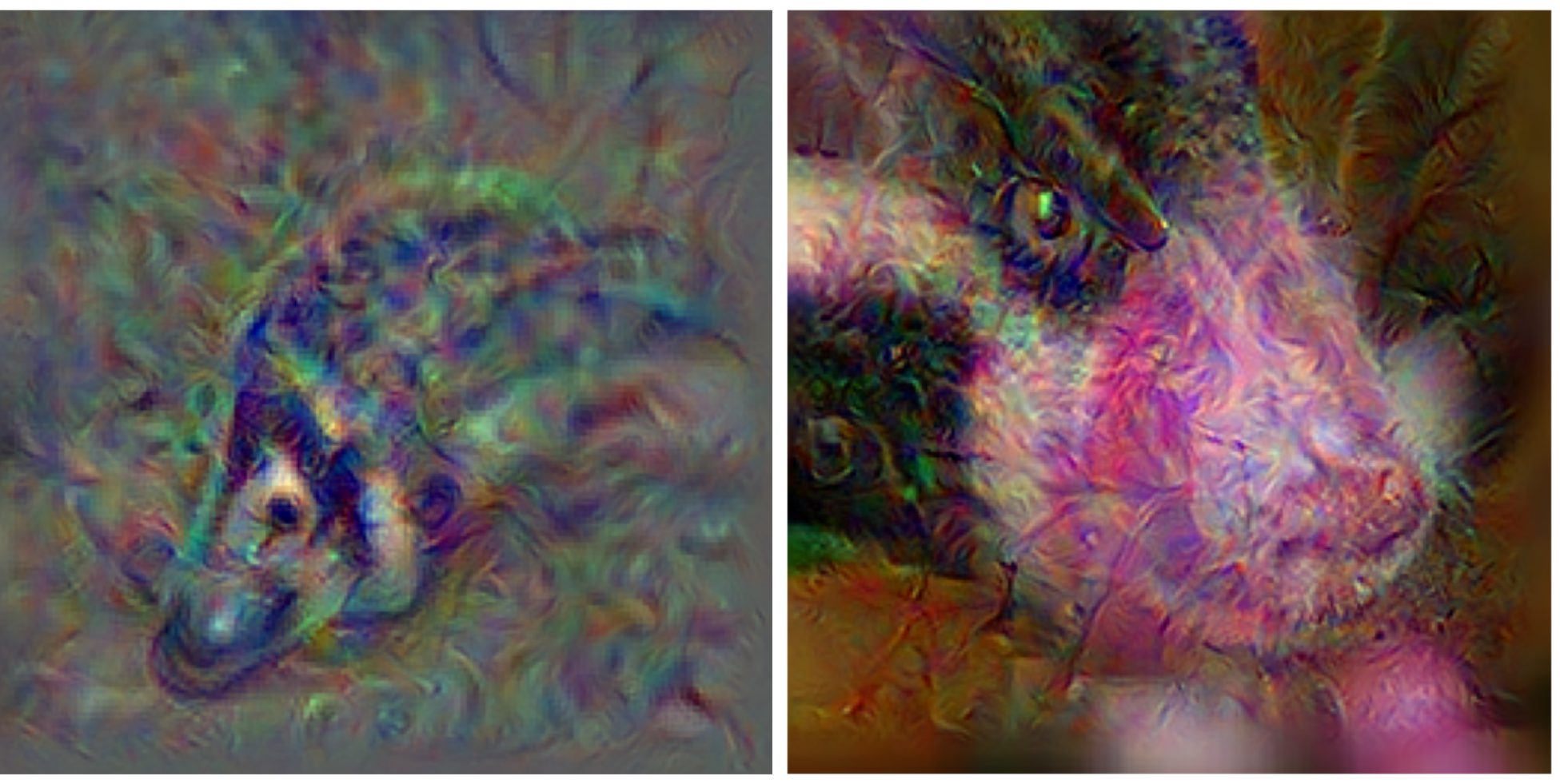
Feature Visualization II: Deep Dream

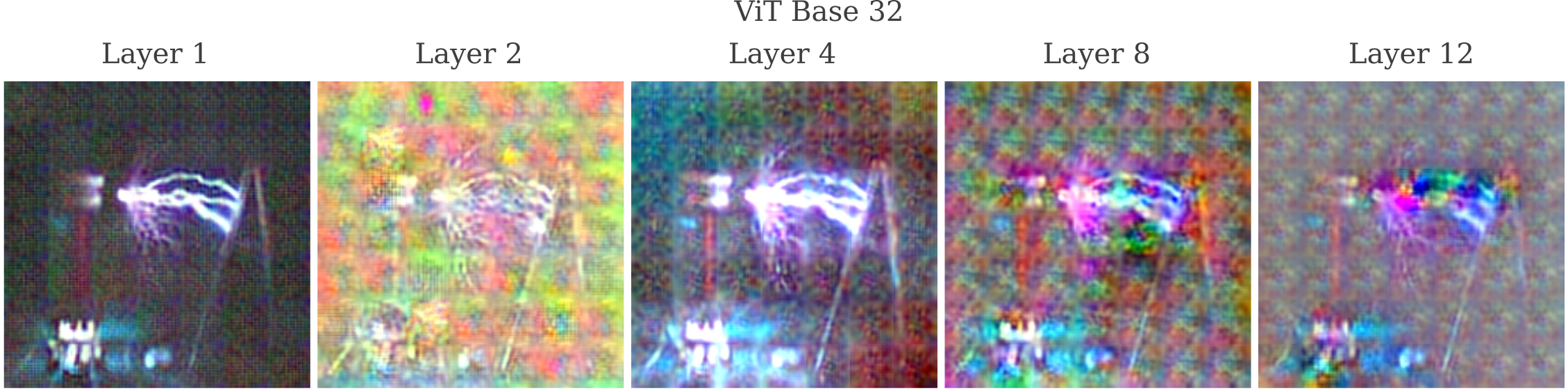
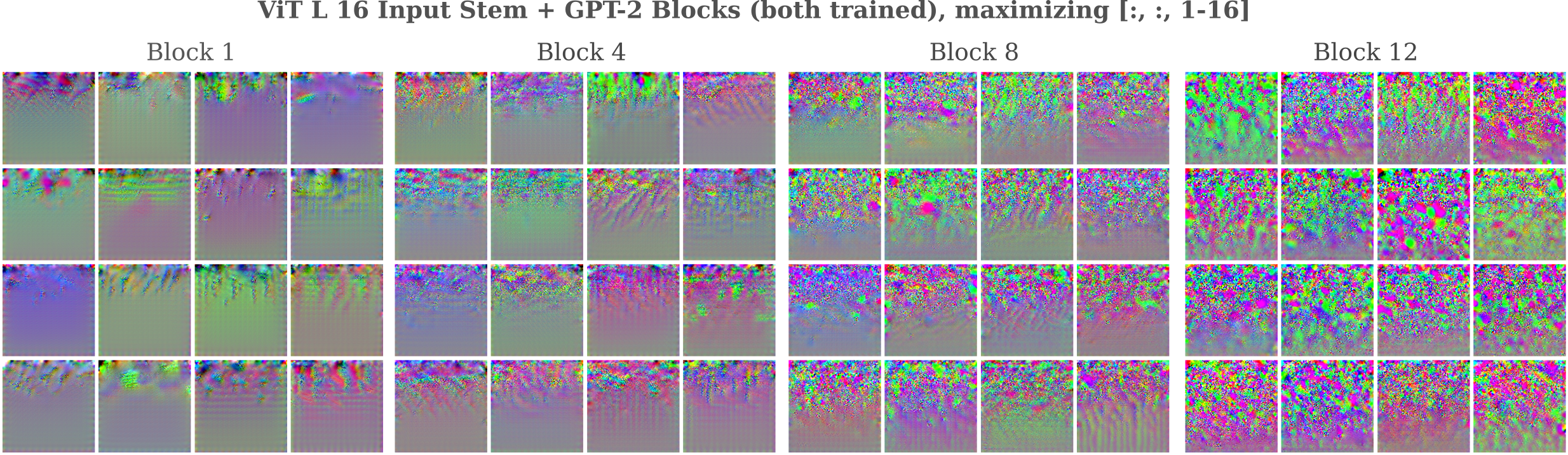
Feature Visualization III: Transformers and Mixers
Language Mixers
Language Mixers II: Large datasets, Bidirectional and one-pass modeling, Retrieval

Language Mixers III: Optimization
\[x_{(k+1)} = x_{(k)} - (J(x_{(k)})^{-1}F(x_{(k)}) \\ \; \\ \theta_W = (X^TX)^{-1} X^T y = X^+ y, \\ X^+ = \lim_{\alpha \to 0^+} (X^TX + \alpha I)^{-1} X^T\]Entropy Estimation
Memory Models
\[I_e = 1 - \frac{H(p, q)}{H(p_0, q)} = 1 - \frac{- \sum_x q(x) \log (p(x))}{- \sum_x q_0(x) \log (p(x))}\]Structured Recurrent Mixers
Linear Language Models
Language Model Secrecy
\[\mathtt{This\; is\; a\; secret\; message} \\ \mathtt{sign所所Batelizeomanip\;welt摄bebby\;Sob.ăng\;}\]Vision Autoencoders

Diffusion Inversion
Generative Adversarial Networks
Normalization and Gradient Stability
Small Language Models for Abstract Sequences
Interpreting Sequence Models
Limitations of Neural Networks
Small Projects
Game puzzles
Programs to compute things
\[\; \\ \begin{vmatrix} a_{00} & a_{01} & a_{02} & \cdots & a_{0n} \\ a_{10} & a_{11} & a_{12} & \cdots & a_{1n} \\ \vdots & \vdots & \vdots & \ddots & \vdots \\ a_{n0} & a_{n1} & a_{n2} & \cdots & a_{nn} \\ \end{vmatrix} \; \\\] \[\; \\ 5!_{10} = 12\mathbf{0} \to 1 \\ 20!_{10} = 243290200817664\mathbf{0000} \to 4 \\ n!_k \to ? \; \\\]Low Voltage
In many ways less stressful than high voltage engineering, still exciting and rewarding.
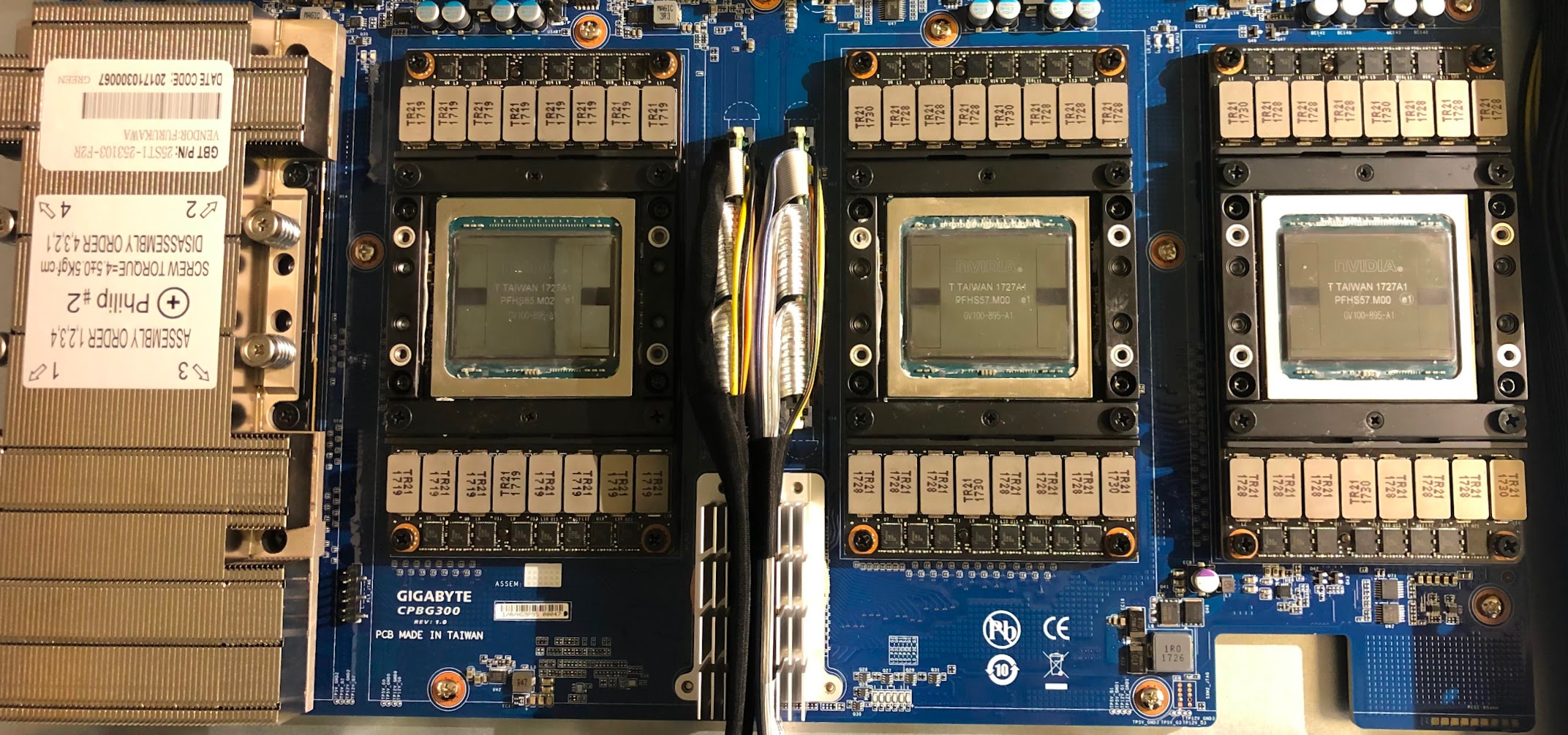
Deep Learning Server
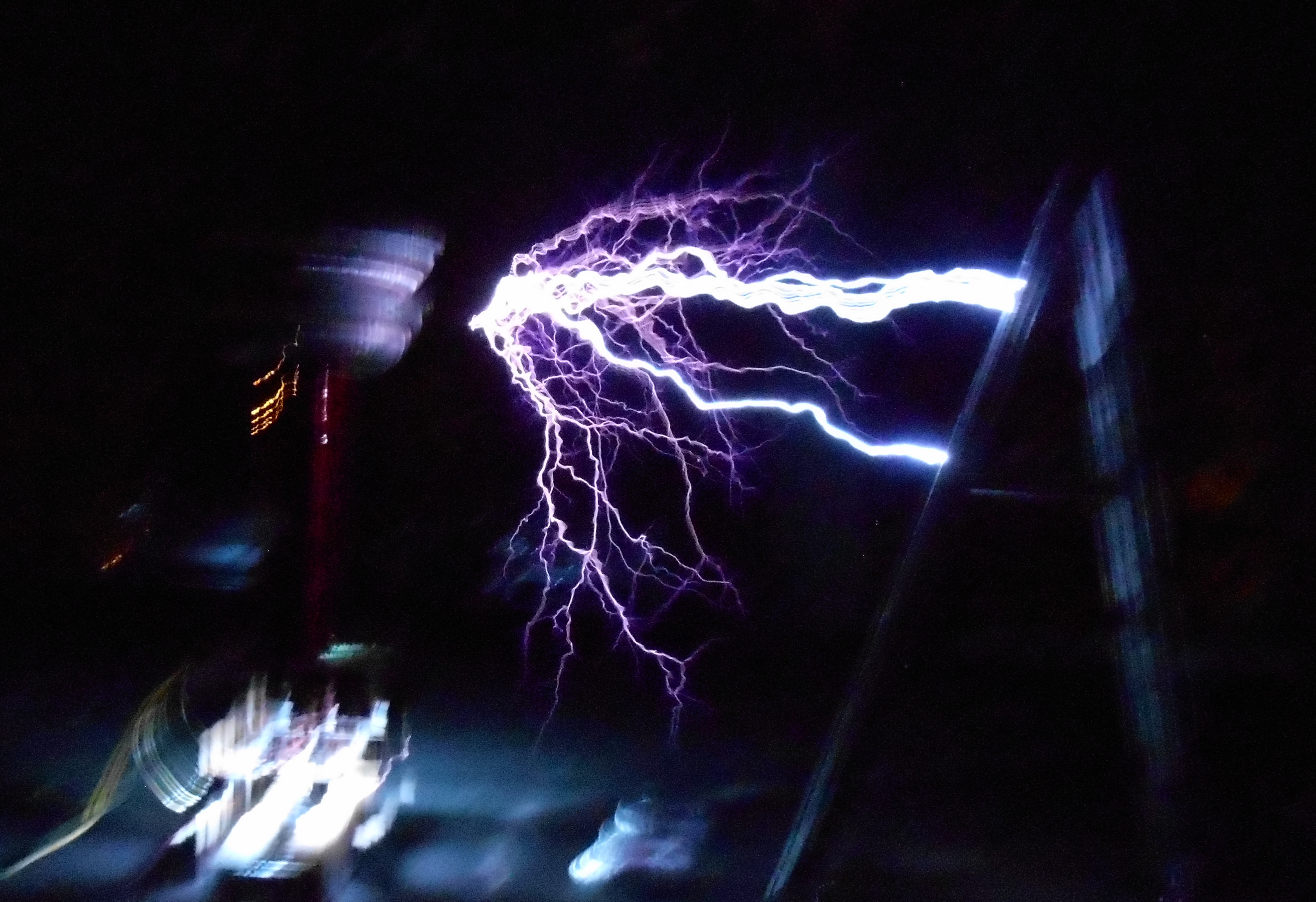
High Voltage
High voltage engineering projects: follow the links for more on arcs and plasma.
Tesla coil
Fusor